- État de l'art et étude de faisabilité
- Cahier des charges, spécifications fonctionnelles et techniques
- Chiffrages BOM (Bill of Materials) et réalisation et développement logiciel
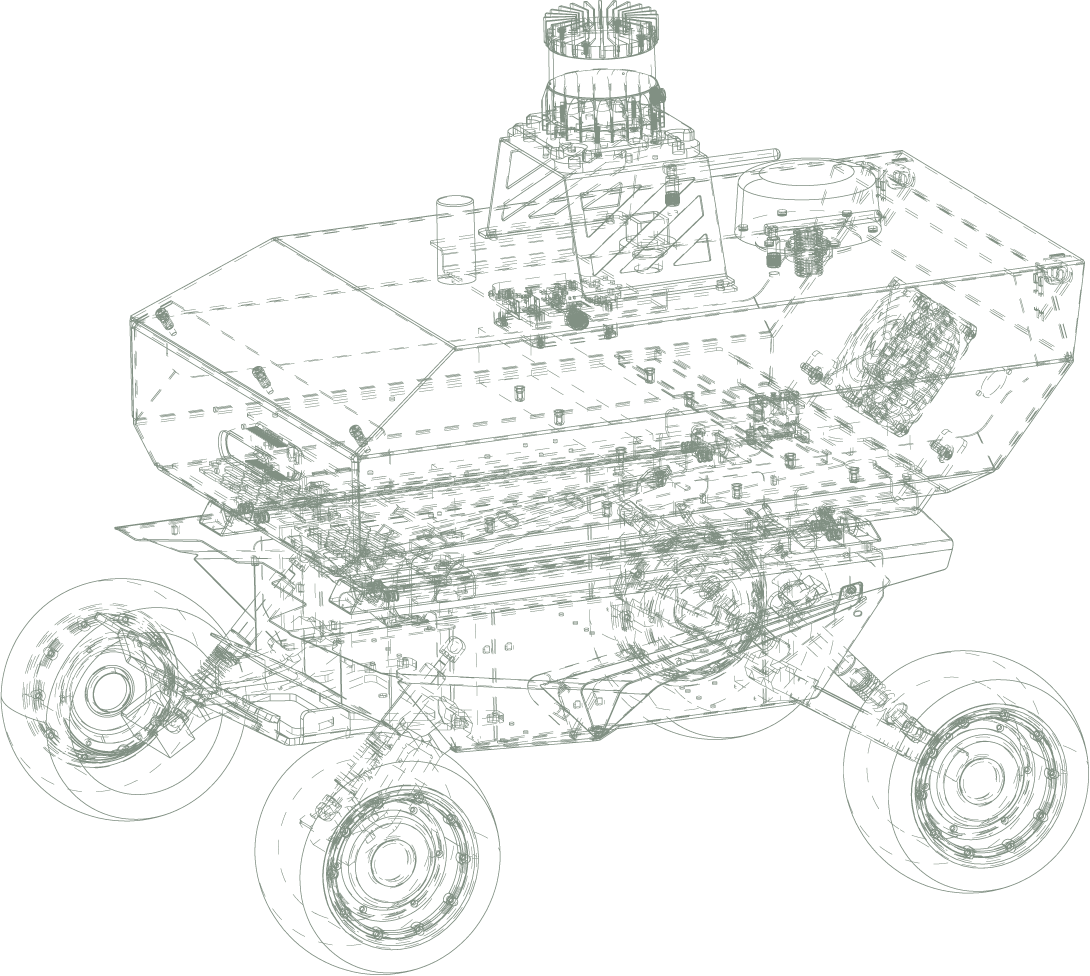
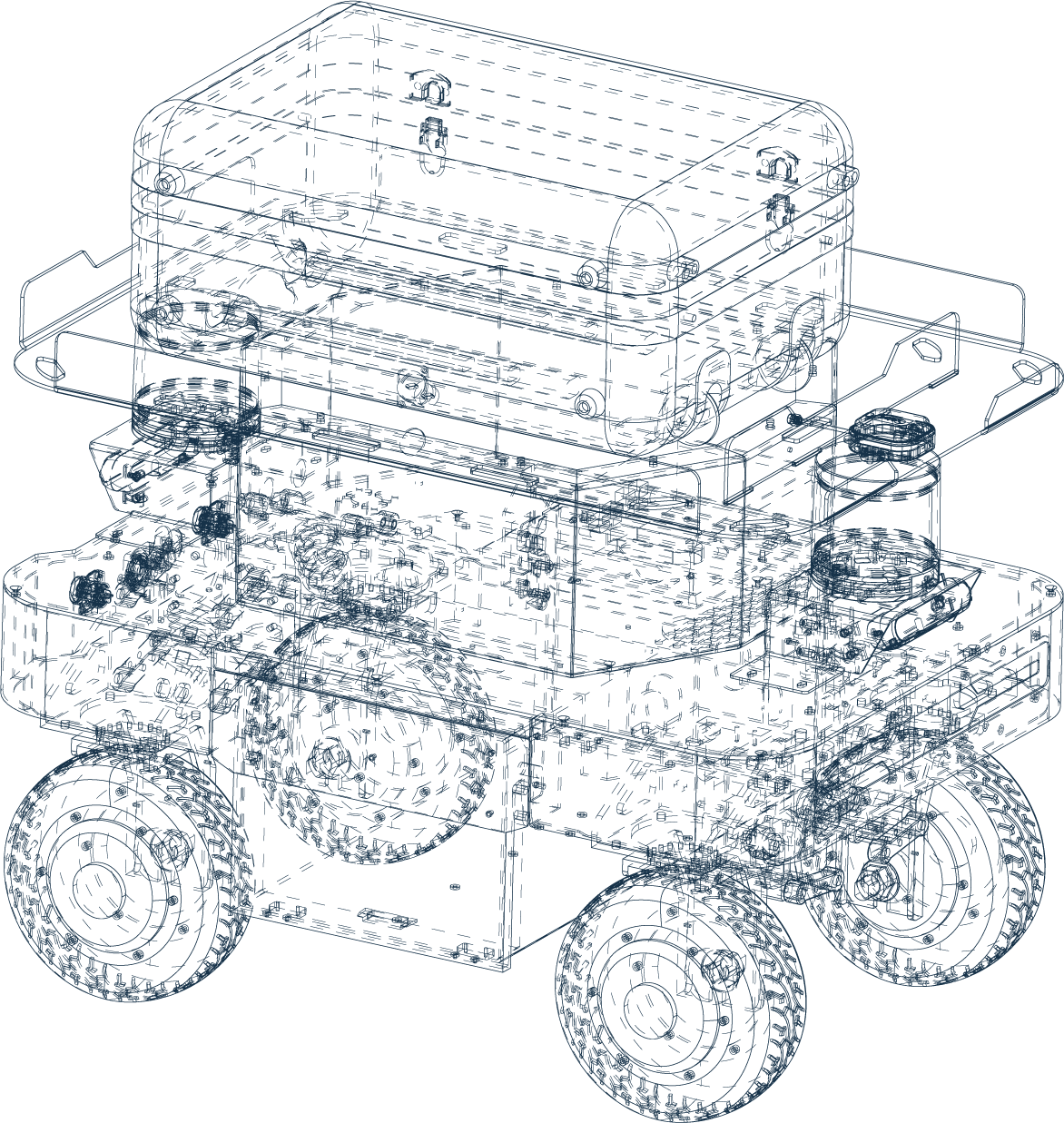
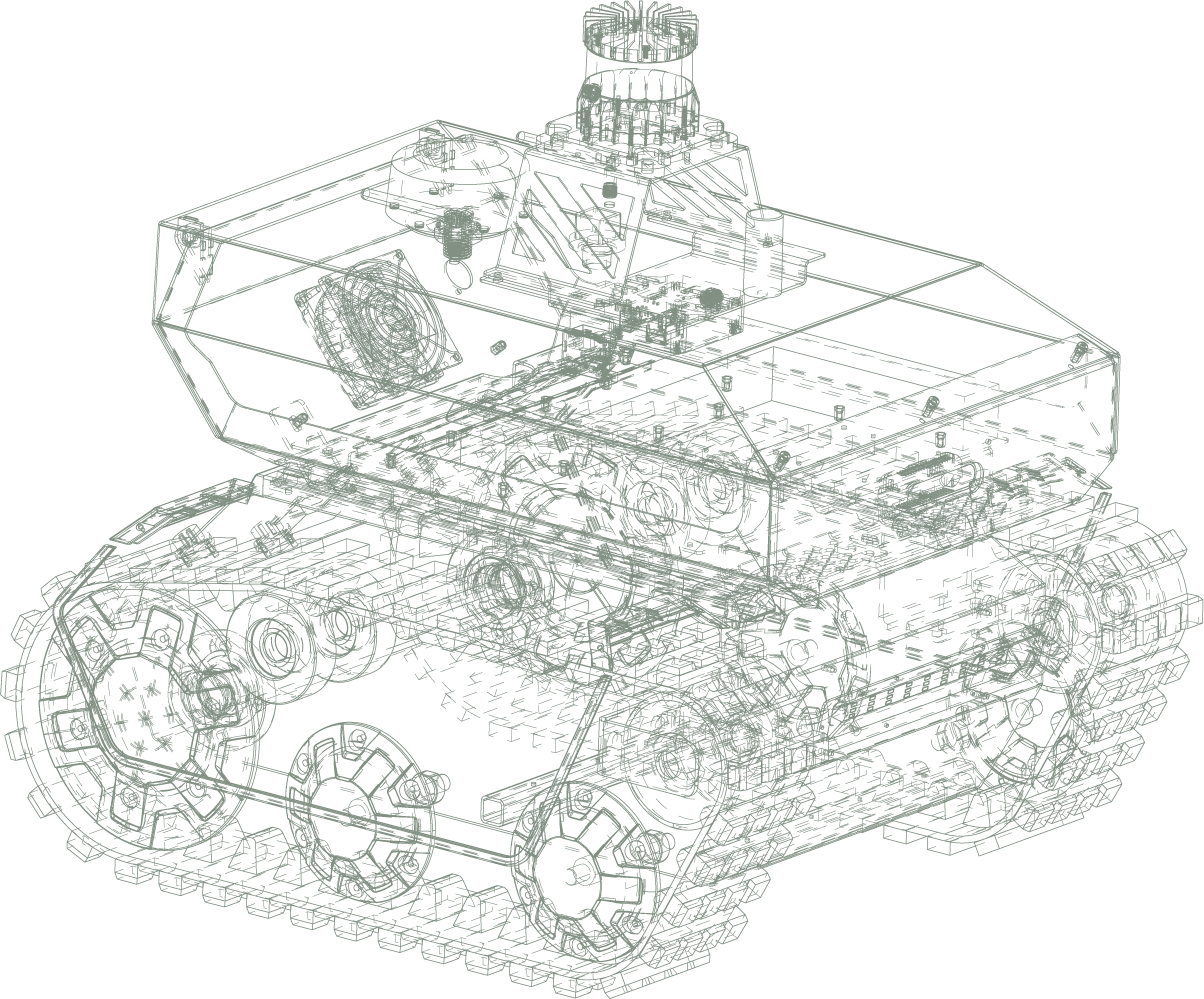
- Modélisation 3D et simulation
(ROS1 ou ROS2)
- Le robot (base mobile, composants / capteurs et pièces mécaniques sur mesure)
- URDF (visuel 3D et position des capteurs)
- Installation des drivers de chaque capteur
- Développement d'un environnement de simulation Gazebo (option)
- Briques logicielles pour la navigation autonome (cartographie, localisation, navigation en fonction du projet)
(ROS1 ou ROS2)
- Logiciel métier (interface graphique)
- Bureau distant (NoVNC)
- Installation des drivers de chaque capteur
- Développement d'un environnement de simulation Gazebo (option)
- Briques logicielles pour la navigation autonome (cartographie, localisation, navigation en fonction du projet)
- Applicatif métier et IHM embarquée / outil de gestion de flotte (option)